Need Help Configuring Your Control System?
If you're interested in our controllers for your research or development project, please get in touch!
Caplex® Control Solutions
Caplex® Wearable Devices are exceptionally lightweight, high-performance, and versatile thanks to years of careful engineering and their leveraging of off-board actuation and control systems. All of our Wearable Devices are modular, to accommodate users with varying body dimensions and range of motion, and interchangeable to streamline experimental protocols and use in multi-investigator environments. Our Wearable Devices are designed to control single joints, with one or more degrees of freedom and/or actuation. Multiple devices can be combined to affect multiple joints.


Speedgoat Real-Time Target, customized for use with Caplex
- The Mathworks-preferred platform for control of robotics systems
- Very high performance system components mean you don’t have to worry about optimizing your code early in the development process
- Seamless integration with the Caplex® Software suite means you don’t have to worry about firmware and can focus on the meaningful work
- Full-Sized, Small-Scale, and Portable versions to suit your needs
A robust I/O Unit that provides plug-and-play access to all of the Real-Time Target’s pre-configured I/O, including:
- E-Stop/Start circuit that cuts power to the motors in the event of a hard-stop condition, operator emergency stop command, or electrical cable disconnection
- Dedicated Analog, E-Stop/Start, and Quadrature channels for each wearable device degree-of-actuation
- I/O Modules containing strain gauge amplifiers to condition signals for each degree of actuation, easily removable for flexibility, scalability, and regular calibration
- General purpose Analog and Digital I/O
- Full-Sized, Small-Scale, and Portable versions to suit your needs
- Industry standard workstation pre-configured with all necessary network connections and software installations to enable immediate out-of-the-box functionality
- Full-Sized, Small-Scale, and Portable versions to suit your needs
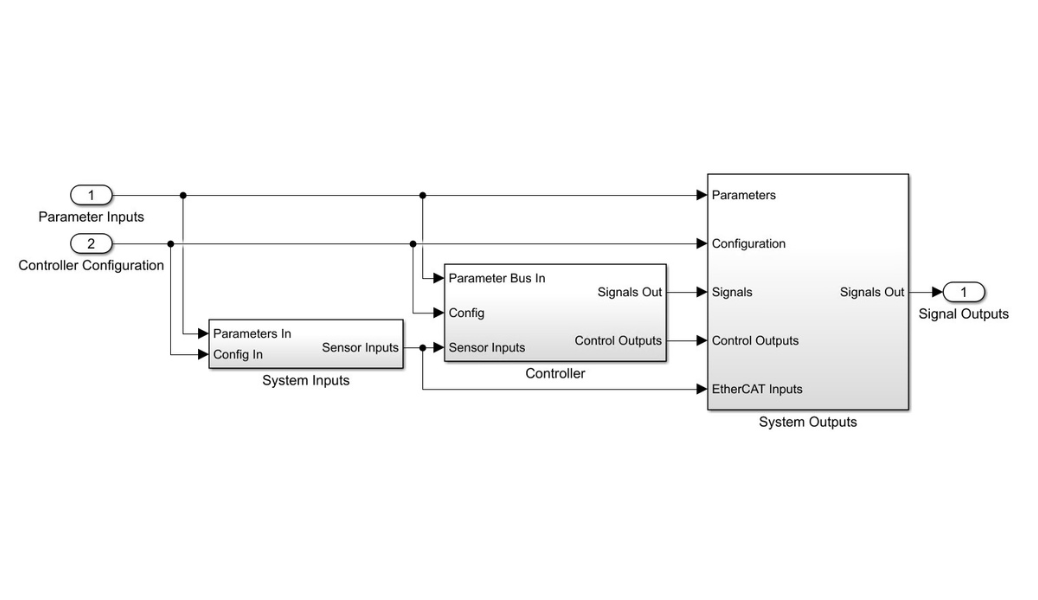
Wearable robotics control algorithms that provide foundational functionality which you can modify and/or build upon to achieve your research & development objectives.
- Joint torque and position controllers drive Caplex Actuator Units over EtherCAT with proven performance
- Example joint torque vs. angle controllers specifically designed for your Humotech-supplied Caplex wearable devices
- Cable force vs. time template controller which can be adapted to control just about anything
- Safety features to limit torque, range of motion, or any other critical biomechanical measures to protect users and devices from excessive actuator inputs
- Common utilities in a Simulink library to simplify building custom controllers
- Flexible architecture that enables you to quickly and easily add or remove degrees of freedom, sensors, actuators, and other controller elements
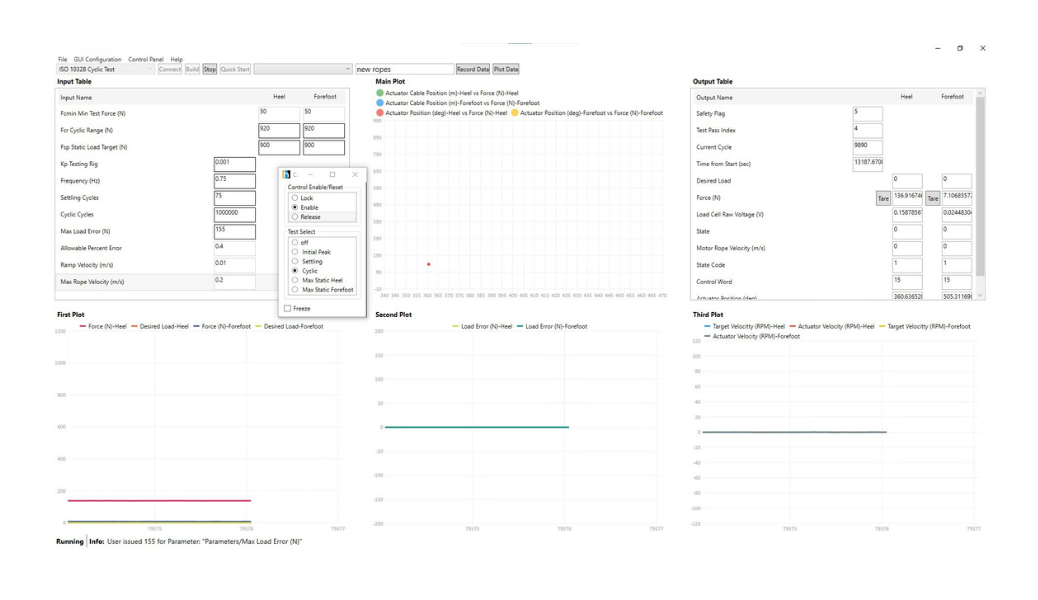
A versatile GUI that interfaces with MATLAB and Simulink to enable you to easily change system behavior on the fly, and monitor system response in real time.
- Saveable GUI layouts and hardware/software configurations so that every use case for your system can be customized and remembered for easy switching between projects
- Flexible data recording and plotting utilities to help you interpret system behavior quickly and precisely
- Error logging to streamline debugging