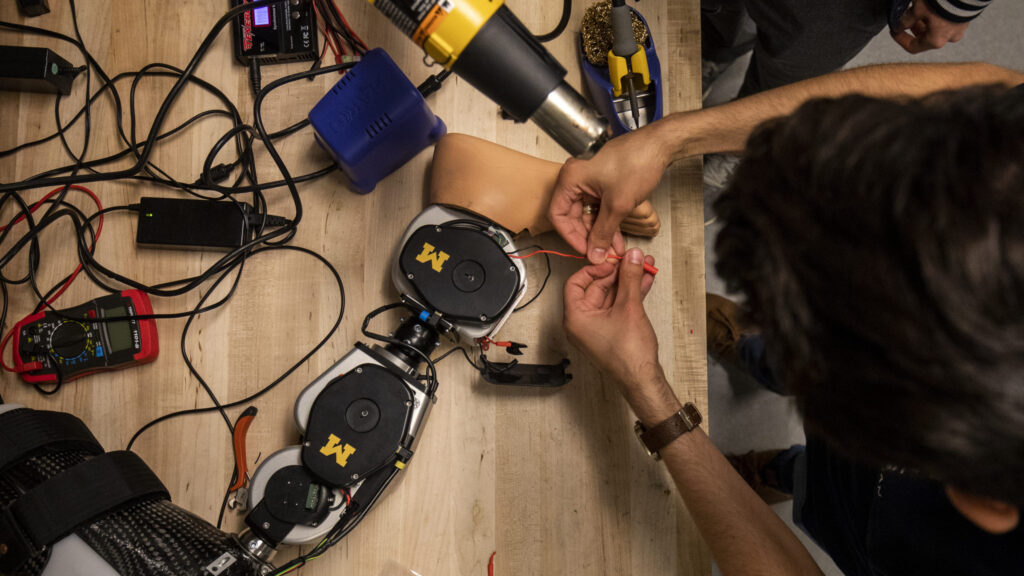
Researchers at the University of Michigan have created a completely open-source robotic prosthetic leg (OSL). The robust and relatively inexpensive modular system is designed to lower the barrier for conducting research by giving investigators an alternative to having to develop their own systems from scratch. Researchers can access downloadable hardware and software files on the website. The OSL hopes to unify the research field of prosthetic leg controls, facilitating comparison between control strategies and potentially streamlining the field towards highly functional robotic prosthetic legs. A fully-supported version of the OSL is now available for purchase through Humotech. Check it out on our Partner Products page!