Type of Customer
Academia
System Type
Software
About the Project
Dr. Kota Takahashi, Associate Professor in the Department of Health and Kinesiology at the University of Utah and director of the Sayu Lab for Biomechanics & Locomotion, leads research focused on understanding and improving human movement through interdisciplinary biomechanics. His work integrates engineering, physiology, and clinical insight to address fundamental questions in prosthetic and wearable robotics design.
In collaboration with Humotech, Dr. Takahashi’s lab has leveraged the Caplex® platform—specifically the PRO-004 Pylon Emulator—to investigate how programmable axial stiffness and shock absorption influence gait mechanics, energetics, and user experience in prosthetic foot research.
Research Challenge
Traditional prosthetic feet and pylons are manufactured with fixed mechanical properties, limiting researchers’ ability to systematically study how variations in stiffness and shock absorption affect gait dynamics. This rigidity makes it difficult to isolate causal relationships between device mechanics and outcomes such as metabolic cost, stability, comfort, and long-term musculoskeletal health.
For academic researchers like Dr. Takahashi, there is a need for experimental tools that:
- Enable rapid, repeatable modification of prosthetic mechanical properties
- Allow safe, real-time testing with human participants
- Generate high-resolution biomechanical data across conditions
Goals and Objectives
The Sayu Lab’s work with the PRO-004 Pylon Emulator aims to:
- Quantify how changes in axial stiffness and shock absorption affect gait mechanics and energetics
- Evaluate the interaction between prosthetic foot stiffness, pylon behavior, and overall locomotor performance
- Inform the design of next-generation prosthetic components that better align with user needs and movement goals
These objectives support a broader translational mission: generating evidence that can guide both device innovation and future clinical applications.
Approach
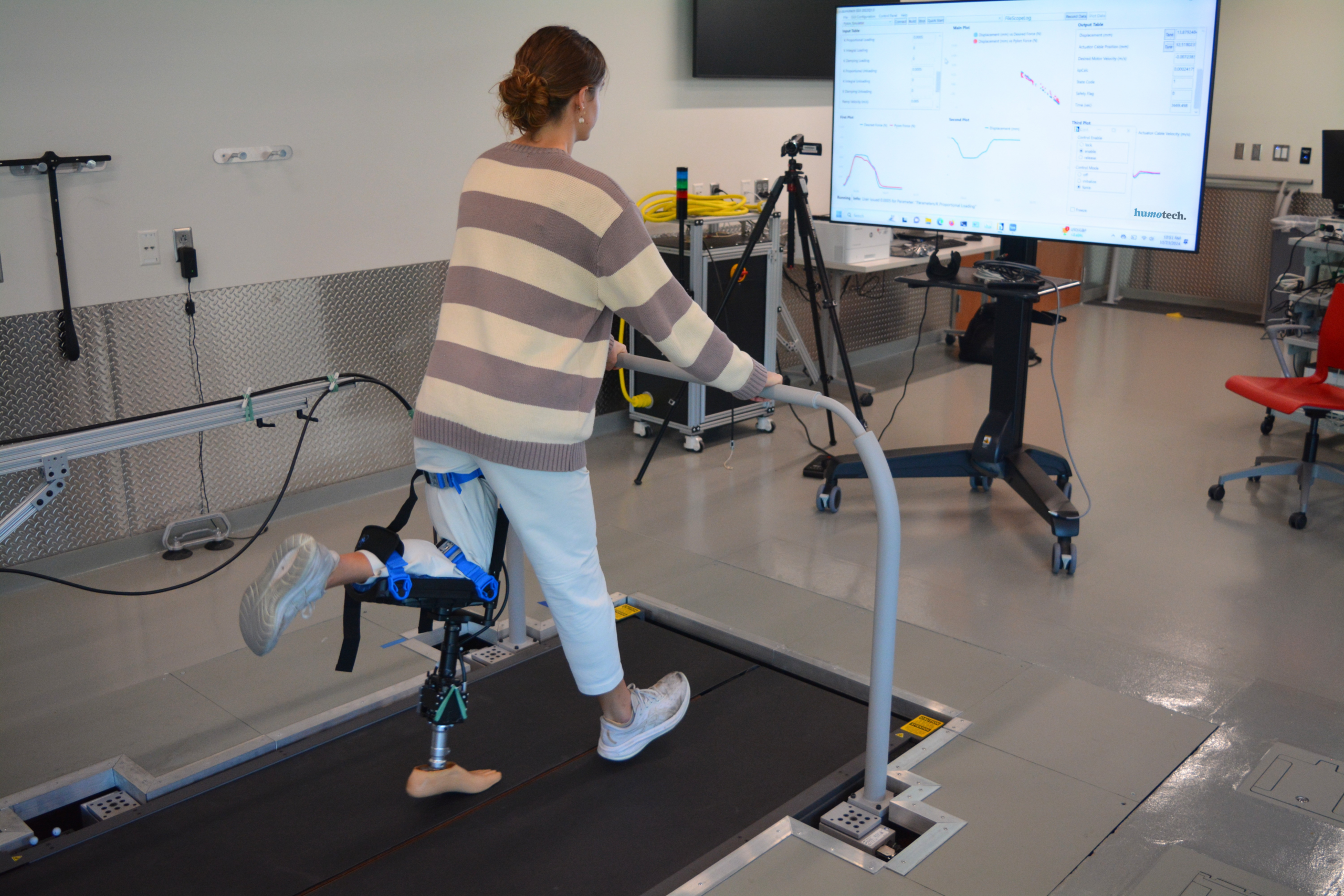
Dr. Takahashi’s team integrated the PRO-004 Pylon Emulator into controlled laboratory gait experiments. The PRO-004 is a single degree-of-freedom, tethered robotic pylon capable of exhibiting a wide range of programmable axial stiffness behaviors. It can be paired with Caplex™ ankle-foot prostheses or commercially available prosthetic feet, enabling flexible experimental configurations.
- Programmable Stiffness Control: Systematic variation of linear and non-linear stiffness profiles during walking trials
- Real-Time Sensing: Use of embedded force and displacement sensors to capture high-fidelity loading data
- Human-in-the-Loop Testing: Safe evaluation with participants to observe adaptive gait responses under different mechanical conditions
This setup allowed the lab to emulate and evaluate shock-absorbing pylon designs without fabricating multiple physical prototypes.
Results
- The emulator reliably tracked commanded stiffness profiles under gait loading
- Researchers could isolate the effects of pylon mechanics independently from foot keel properties
- The approach motivates future studies involving user preference, fatigue, injury risk, and clinical populations
Impact
By enabling precise, data-driven evaluation of prosthetic pylon behavior, the PRO-004 Pylon Emulator advances the science of biomechanics and prosthetic design. For Dr. Takahashi and other academic researchers, the system:
- Accelerates hypothesis testing and experimental iteration
- Reduces reliance on custom-built hardware and trial-and-error prototyping
- Bridges the gap between laboratory research and real-world prosthetic innovation
This collaboration exemplifies how adaptable robotic emulation platforms can empower academia to generate insights with lasting impact on mobility research and future clinical care.
Researcher Perspective
In interviews and podcast discussions with Humotech, Dr. Takahashi emphasizes the importance of curiosity, scientific rigor, and collaboration in biomechanics research. Technologies like the Caplex® System and PRO-004 Pylon Emulator play a critical role in enabling translational research—turning fundamental biomechanics questions into practical knowledge that can improve human mobility.
Collaborators
References
- https://humotech.com/blog/deep-dive-with-dr-kota-takahashi-advancing-the-science-and-impact-of-biomechanics-research/
- https://humotech.com/blog/introducing-the-pro-004-pylon-emulator-revolutionizing-prosthetic-foot-research/
- The Practical Science of Biomechanics: Movement Insights from Dr. Kota Takahashi



{kind=link}
{kind=link}
{kind=link}