Philippe Malcolm, Arash Mohammadzadeh Gonabadi & the @UNOBiomechanics team are exploring a hybrid exosuit/exoskeleton design to assist folks with peripheral artery disease walk with less effort. #Biomechanics
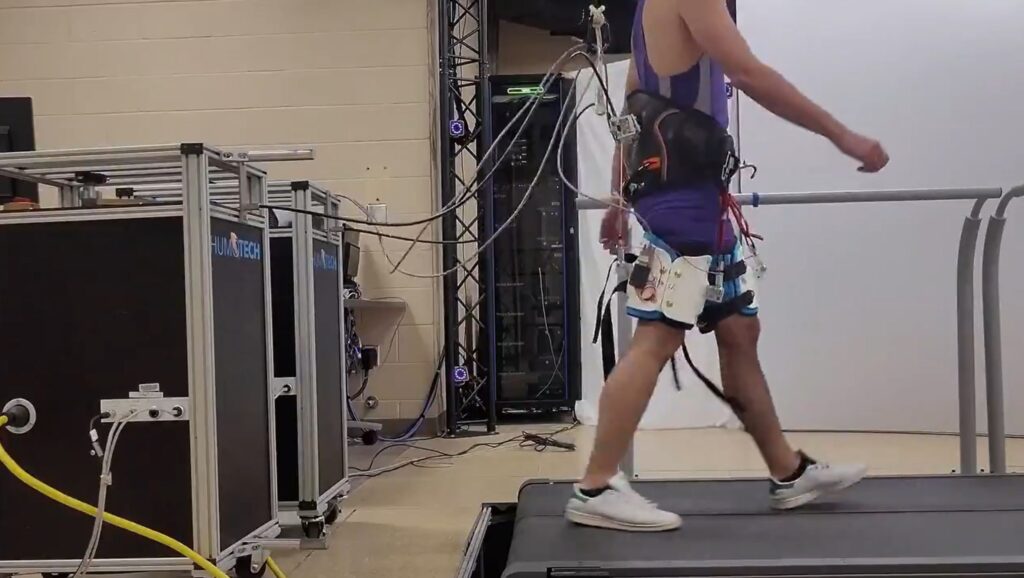
Philippe Malcolm, Arash Mohammadzadeh Gonabadi & the @UNOBiomechanics team are exploring a hybrid exosuit/exoskeleton design to assist folks with peripheral artery disease walk with less effort. #Biomechanics

They’re working towards reducing the metabolic cost of various gaits with this comfortable & compliant device. @StanfordEng @StevenHCollins @g_m_bryan @p_franks_

Thanks to Jacky and our friends at @VanderbiltU for this exciting research on advanced #prosthetic #feet. #AmputeeLife #AssistiveDevices @DavidZiemnicki @KarlZelik
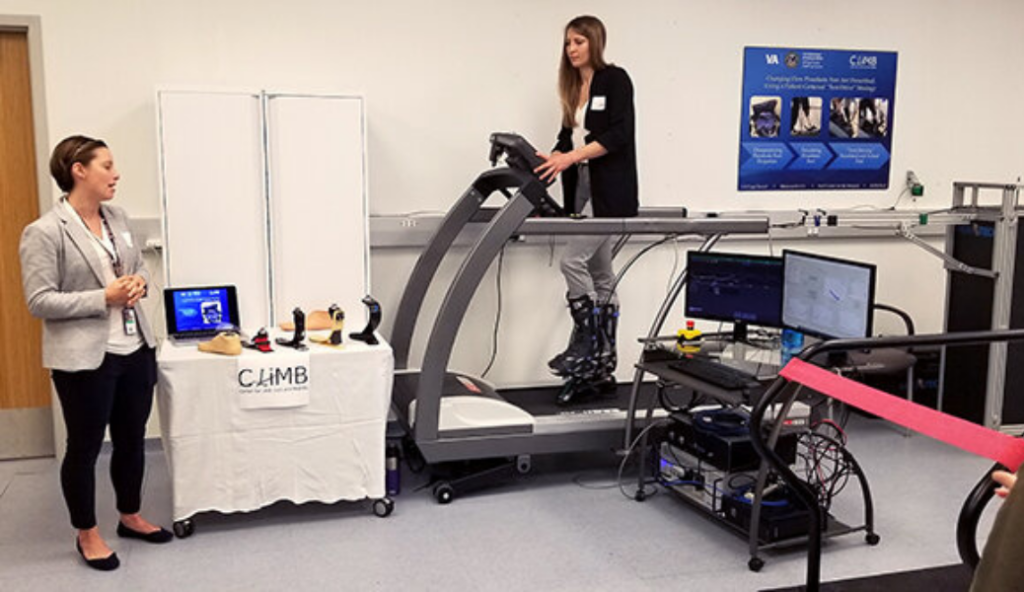
Researchers at the VA Center for Limb Loss and MoBility are improving the patient prescription process by bringing together research, clinician knowledge, and patient care.

Really excited to be working with Jess Selinger, @MeganMcAll_Kin, and others at the #Neuromechanics Lab. #Innovation #Humotech

Beth Halsne was the recipient of an Orthotic & #Prosthetic Education & Research Foundation (OPERF) 2020 Fellowship Award for research on gait #biomechanics with commercial and emulated feet. The one-year fellowship recognizes outstanding graduate students and their excellence in research related to the O&P profession. Beth and her advisor David Morgenroth will use this award […]
The system is a tethered #robotic ankle-foot prosthesis designed for research & development aimed at discovering new ways of enhancing #mobility for persons with lower-limb amputation. https://t.co/TcVvNXWSda?amp=1

Researchers at Stanford University have created a completely open source robotic perturbation system (Bump’em). The system simulates various modes of fall-inducing perturbations in a repeatable way, enabling fundamental research on human gait and balance and facilitate the development of devices to assist human balance. To facilitate use by researchers from all backgrounds, the team designed […]
Check out her story and if you’re a woman in STEM apply to share your story! https://1mwis.typeform.com/to/L43uyN #mobility #robotics @gatechengineers @GT_Sciences @MEGeorgiaTech

Humotech is here to support labs wanting to build this system. Contact us to learn more. #AcceleratingInnovation #Biomechanics #Research @StanfordEng