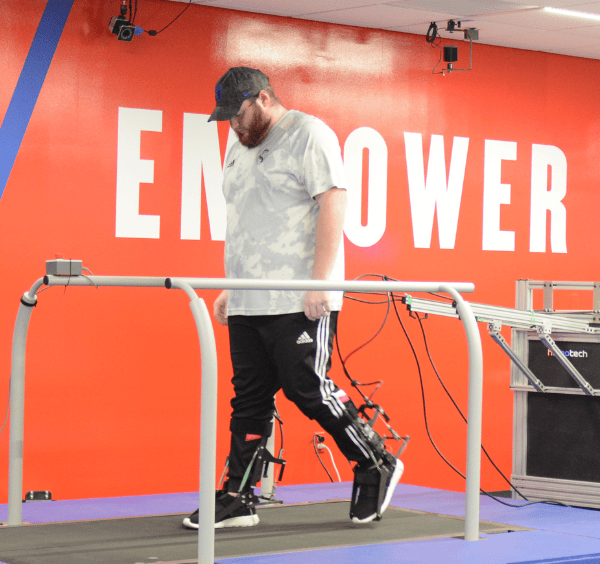
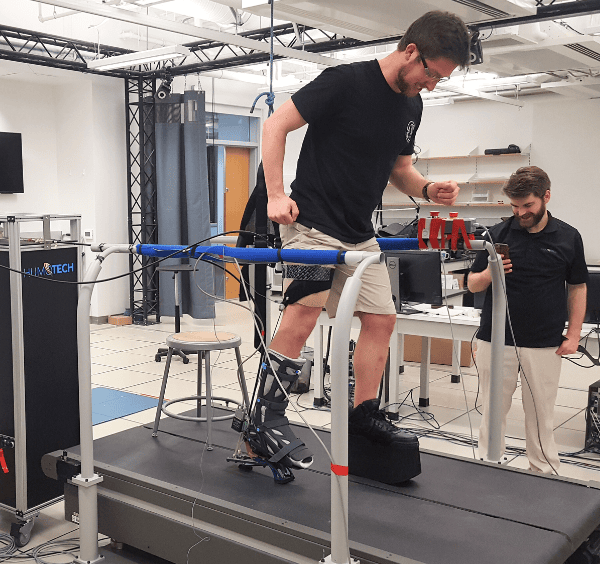
Dr. Philippe Malcolm and his team at the University of Nebraska at Omaha are pioneering research into gait energetics using waist-tethered systems. This innovative setup allows researchers to investigate how external support affects the metabolic costs of walking and running. By tethering subjects at the waist, Dr. Malcolm’s studies provide insights into the biomechanics and energy demands of gait, paving the way for advances in assistive device design and wearable robotics.