


Vanderbilt University, HeroWear, and the challenge to create industrial exoskeletons that work in the real world
In today’s workforce status quo, certain jobs inevitably come with a higher risk for bodily injury. Warehouse operators, construction workers, health care workers, agricultural workers, and many essential jobs require lifting, bending, and repetitive movement that can strain the back and body.
Back pain and back injury are all too common to workers across industries. Back pain in the US alone has a price tag of over $100 billion a year for medical care, worker compensation payments, and time lost from work. It’s a drain on time, money, and of course, quality of life. Clearly, solutions are needed.
Enter the Exosuit
Researchers from Vanderbilt University are on the frontlines of this multifaceted problem. Matt Yandell holds a PhD from Vanderbilt in mechanical engineering. Karl Zelik is a professor at Vanderbilt where he heads the Zelik Lab for Biomechanics and Assistive Technology. Both are leading researchers in biomechanics and exoskeleton technology. They are also co-founders of HeroWear, a Vanderbilt spinoff based in Nashville that specializes in developing real-world exosuits (soft exoskeletons) for the workplace.
Upon forming HeroWear in 2019 Zelik and Yandell set out to answer the question – is it possible to design a commercial exosuit for the workplace that is both effective and ergonomic? In other words, one that can provide assistance, but also comfort and freedom of movement?
Making the transition from the dreamed-up tech of superhero mythology (Iron Man being the most famous example) to real-world solutions for use on a daily basis, exoskeletons present one of the most exciting engineering challenges of our time. The development of “industrial exoskeletons” used to assist and augment workers on the job isn’t a brand new concept and has been gradually gaining ground, but many barriers stand in the way of creating commercially viable products capable of winning wide industry adoption. There are several key reasons why we don’t see them being more regularly adopted and utilized.
Among those is the lack of fundamental research and guidelines that could help developers design devices that are effective, safe, comfortable, and sustainable (able to perform over the long-term). Although noting many pros, the CDC also lists concerns about industrial exoskeleton applications gathered through independent studies, such as unintended muscle strain, ultimately stressing the need for more scientific research to inform development.
A key area of exo research that needs to be established is user comfort, and in particular, comfort limits – the amount of force that can be applied to a device interface (such as worn on a shoulder or thigh) before causing discomfort or pain to the wearer. An exosuit, for example, involves many interactions between the worn interface and a user’s biological tissues.
“Any time we start applying something external to the body,” Yandell explains, “we’re not going to interact perfectly with the human frame and the human musculoskeletal system.” When it comes to exosuits, a suit that applies higher forces can offer greater assistance, but can also cause increased discomfort and ultimately failure to continue using the device.
When Yandell and Zelik started researching the comfort limits of wearable devices at Vanderbilt, they found there was little quantitative data or published guidelines available. How much force can be applied to a given body segment? How do comfort limits vary across individuals (gender, weight, body types, etc.)? How do they change over time (minutes, hours, days)? Having these kinds of quantitative data would help to fill in that knowledge gap and guide developers in the design and optimization of wearable exosuits.
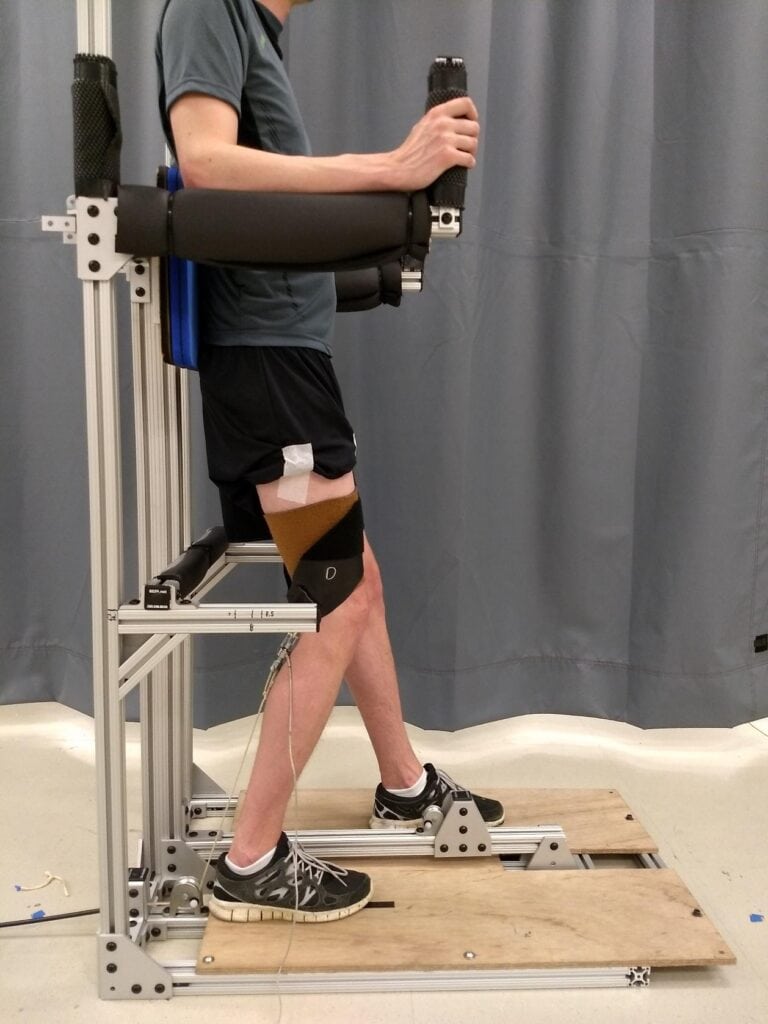
They set out to investigate, focusing on three key areas of the body relevant to exosuits: the shoulders, thigh, and shank. Study participants wore soft exosuit interfaces on these areas and pulling forces were systematically applied using a Humotech robotic actuator and control system. When users felt uncomfortable, they pushed an off-switch to stop the actuation system from delivering force.

Testing a variety of variables and scenarios over the course of four days, the researchers were able to gain knowledge and insight into comfort limits and published their findings in PLOS One in 2020 (read it here), further driving home the importance that comfort plays in exo design. One interesting finding suggests that comfort limits may actually increase over time as the wearer gets used to the device, which should be considered when testing devices for user comfort.
While the study looked at short-term comfort limits, the authors note that it could help to inform the design of future longer-term studies, which according to Yandell, are critical to exoskeleton research and development:
“We don’t know the long-term implications [of applying external forces to the body with exoskeletons]. That’s one of the big questions now in the field and industry. How do you test these over time? What are the effects on human beings over long periods of time?”
Humotech specializes in providing tools to enable the kinds of experimentation that can help answer these tough questions. In the comfort limits study, the robotic actuator allowed the researchers to quickly test force profiles.
“We were able to carry out rapid, repeatable programmable scenarios, where it would otherwise be unfeasible for a human to apply that much force or impossible to [manifest] that number of cycles,” notes Yandell.
The Vanderbilt team is also engaging the Humotech actuator in other experiments to study musculoskeletal and exo device interaction, testing for optimal levels of stiffness in back-assist exosuits. Yandell has also used it to test HeroWear’s exosuit hardware.
Humotech is helping Zelik and fellow Vanderbilt researcher David Ziemnicki explore prosthetic solutions as well. Collaborating with Josh Caputo, President and CEO of Humotech, they recently developed a novel robotic emulator system to fill biomechanics knowledge gaps and help create more effective commercial prosthetic feet for people with transtibial amputation (publishing in the Journal of Medical Devices). The system emulates the function of a critical component of calf muscles: the gastrocnemius. Commercial below-knee prostheses lack this bi-articular feature, which might leave prosthesis users at a mobility disadvantage. Future research with this new system aims to demystify the potential benefits of an artificial gastrocnemius.
Finding the Right Fit for Industries
Research like Yandell’s and Zelik’s helps to set benchmarks for exosuit design needed to move the whole industry forward. The results from the Vanderbilt comfort limits study was conducted in parallel with the development of HeroWear, so the learnings were available to inform development of HeroWear’s premier back-assist exosuit, the Apex.
The Apex is a wearable fabric exoskeleton that attaches to the shoulders, back, and upper thighs, designed to reduce strain on the lower back. For an average adult, it’s capable of offloading over 75 lbs of strain to the lower back and relieving fatigue of the back muscles, without the use of motors or batteries. Instead, it uses passive-elastic bands that act in synergy with the major muscle groups responsible for bending and lifting, reducing about 15%-40% of peak muscle forces applied; this can result in significant reduction in microdamage to tissue that commonly leads to overuse injuries.
Quickly pressing on a shoulder button (‘clutch’) engages the suit when needed and disengages it when not needed, such as during walking, sitting, or eating lunch. It’s designed to be comfortably worn throughout the day and unobstructive at all times, meaning when both activated and when disabled.
Considering branching into developing commercial industrial exoskeletons, Yandell and Zelik knew going in that ergonomics is a main barrier to gaining adoption – they needed to develop something that people actually want to use. An exosuit might successfully assist warehouse case pickers in lifting heavy boxes or a construction worker who is bent over tying rebar for long periods of time, for example. But if it’s uncomfortable, heavy to wear, and gets in the way of daily work flow, the device can end up being completely counterproductive. Plus, each industry has its own set of specific requirements. Health care workers who regularly lift and move patients need devices that take hospital or health care settings into consideration and are capable of being worn under PPE. Farm and agricultural workers need devices that are compatible with their environment and particular needs.
Zelik and Yandell began formulating the idea of HeroWear after earning positive feedback and awards from Vanderbilt exosuit research shown at the 2017 International Society of Biomechanics conference in Australia. They teamed up with Mark Harris (also a graduate of Vanderbilt) and ergonomics specialist Matt Marino to bring their vision to market (debuting the Apex at WearRAcon 2020).
So far, HeroWear has met with positive results. They’ve delivered Apexes to clients in more than 100 locations around the world. Pilot and field studies show favorable results among workers across industries. And, the suit’s design was internationally recognized with a 2020 Spark Design Award.
Designs Backed by Science and Real-World Testing
The Apex builds on years of research and learning – peer-reviewed research, use cases, field studies, lab testing, trial and error (learn more about the science behind the suit). However, the process of improvement is continuous, as more learning happens across both commercial and research fronts.
It’s the iterative kind of interplay between research and development that will help lead to exo innovation and real-world product adoption. However, the lack of available research shouldn’t keep developers from their work, notes Yandell.
“It’s not enough to simply do the research,” he states, explaining that there’s a real and important value in user testing. Research studies are limited by the number of participants that can reasonably be involved, whereas testing a device in the real world can involve hundreds of thousands of people providing feedback on comfort levels, stiffness, etc.
Discovering and refining exoskeleton solutions for the workforce depends on both of these knowledge streams.
“You need both to get a full picture of what’s going on,” Yandell said. “Both are indispensable.”
By: Danielle Commisso