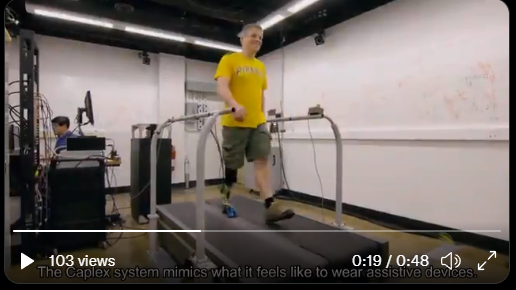
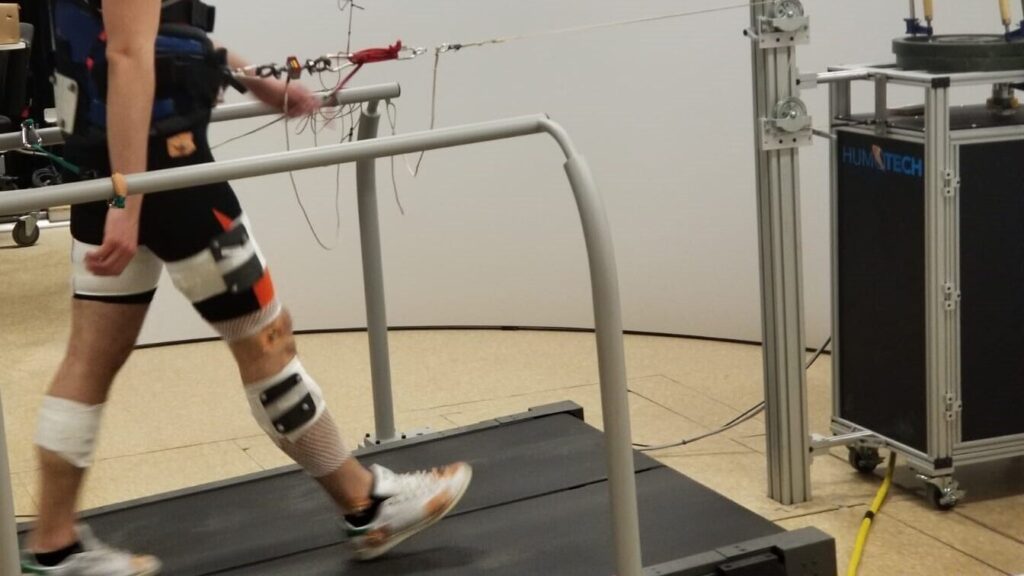
The system is a tethered #robotic ankle-foot prosthesis designed for research & development aimed at discovering new ways of enhancing #mobility for persons with lower-limb amputation. https://t.co/TcVvNXWSda?amp=1
Stay informed on research, innovation, and company updates from the Humotech team.
The system is a tethered #robotic ankle-foot prosthesis designed for research & development aimed at discovering new ways of enhancing #mobility for persons with lower-limb amputation. https://t.co/TcVvNXWSda?amp=1

Researchers at Stanford University have created a completely open source robotic perturbation system (Bump’em). The system simulates various modes of fall-inducing perturbations in a repeatable way, enabling fundamental research on human gait and balance and facilitate the development of devices to assist human balance. To facilitate use by researchers from all backgrounds, the team designed […]
Check out her story and if you’re a woman in STEM apply to share your story! https://1mwis.typeform.com/to/L43uyN #mobility #robotics @gatechengineers @GT_Sciences @MEGeorgiaTech

Brousseau LM, Childers WL, Hansen AH, Walker NR, Behrens KM, Caputo JM, Curran CS, Hafner BJ, Turner AT, Halsne EG, Morgenroth DC. (2020) George E. Omer Jr Research Symposium.

Humotech is here to support labs wanting to build this system. Contact us to learn more. #AcceleratingInnovation #Biomechanics #Research @StanfordEng
Gonabadi AM, Antonellis P, Malcolm P. (2020) IEEE Transactions on Neural Systems and Rehabilitation Engineering.
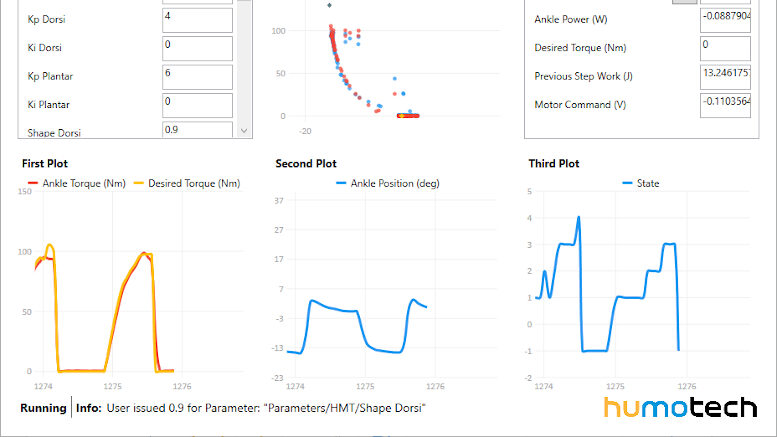
In response to customer feedback, it has been re-engineered for greater usability, functionality, and reliability. Visit https://humotech.comproducts#control to learn more. #Caplex #Simulink #MadeInPGH
Kim M, Lyness H, Chen T, Collins SH. (2020) Journal of Biomechanical Engineering.
Our friends at … (up to ~15% bodyweight). Looking forward to future #biomechanics studies and new #rehabilitation approaches! #AssistiveTech Learn more in this recently published article in @TNSRE1: https://ieeexplore.ieee.org/document/9078836
