By University of Dayton

Stay informed on research, innovation, and company updates from the Humotech team.
By University of Dayton
Exoskeleton Report — Technology

In today’s workforce status quo, certain jobs inevitably come with a higher risk for bodily injury. Warehouse operators, construction workers, health care workers, agricultural workers, and many essential jobs require lifting, bending, and repetitive movement that can strain the back and body.
Morgenroth DC, Halsne EG, Turner AT, Walker NR, Hansen AH, Caputo JM, Curran CS, Hafner BJ. (2021) World Congress of the International Society for Prosthetics and Orthotics.
Halsne EG, Turner AT, Curran CS, Hansen AH, Hafner BJ, Caputo JM, Morgenroth DC. (2021) World Congress of the International Society for Prosthetics and Orthotics.

American Orthotic & Prosthetic Association (AOPA) – O&P Almanac
Poggensee, KL, Collins SH. (2021) Science Robotics.
Ziemnicki DM, Caputo JM, McDonald KA, Zelik KE. (2021) Journal of Medical Devices.

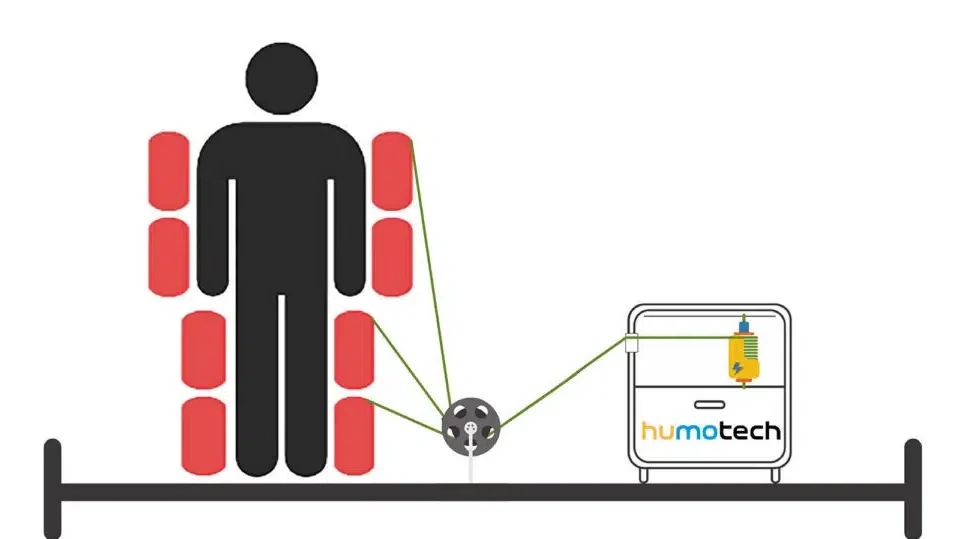
Humotech now offers a completely portable robotic emulation system to assist the research and development of wearable assistive devices. Introducing the BCK-001 Portable Caplex System – a compact, lightweight version of Caplex that can be worn as a backpack inside or outside of the lab, or mounted for benchtop operation.
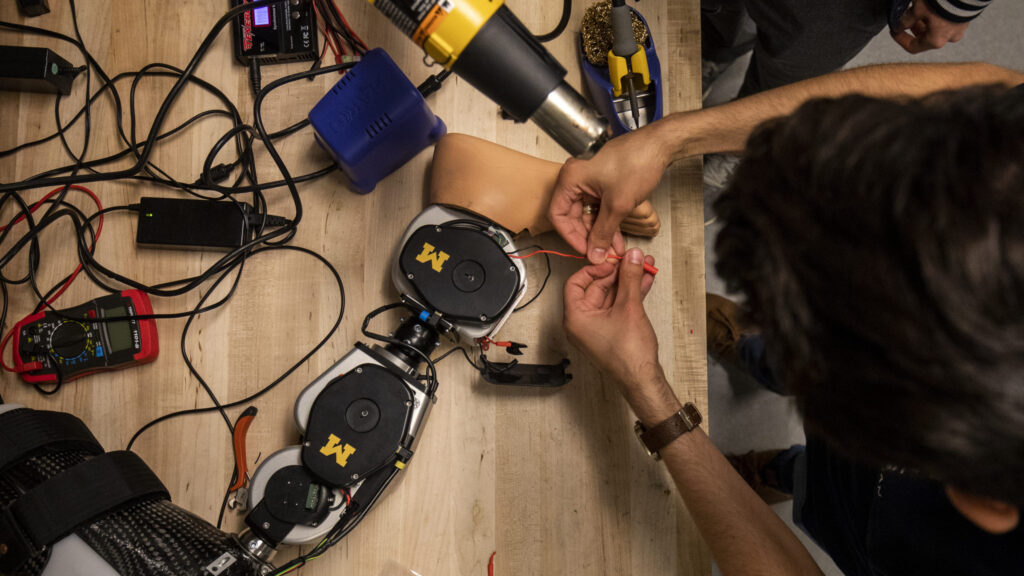
Researchers at the University of Michigan have created a completely open-source robotic prosthetic leg (OSL). The robust and relatively inexpensive modular system is designed to lower the barrier for conducting research by giving investigators an alternative to having to develop their own systems from scratch. Researchers can access downloadable hardware and software files on the website. The OSL hopes to unify the research field of prosthetic leg controls, facilitating comparison between control strategies and potentially streamlining the field towards highly functional robotic prosthetic legs. A fully-supported version of the OSL is now available for purchase through Humotech. Check it out on our Partner Products page!